

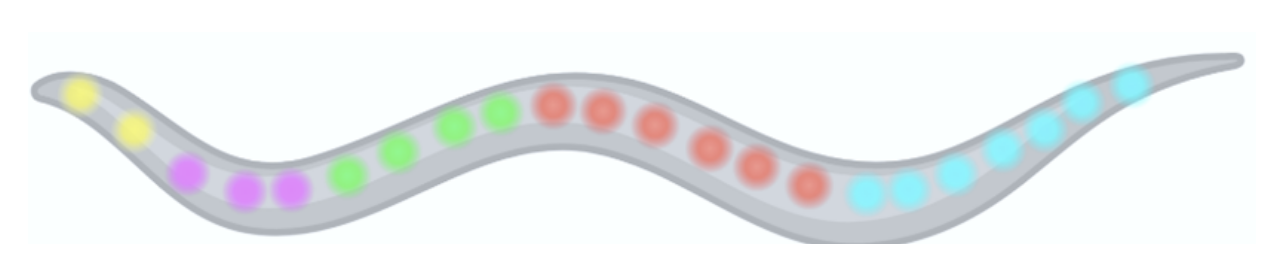
The project is called LuCelegans (Luce: light in latin; Light–up C. elegans), or the Interactive Worm Project. It is about building the first interactive, physical, 3–dimensional prototype of C. elegans nervous system. Caenorhabditis elegans (C. elegans) is a tiny transparent roundworm, a very broadly used model organism in experimental biology, especially biology of aging, developmental biology, and neurobiology. Moreover, it is the only living organism with a fully mapped nervous system. Although it has only 302 neurons (and >5,000 synapses), this small invertebrate is capable of foraging, mating, decision–making, and learning. The idea is to build a physical medium scale prototype, which will include realistic representations of key neurons (sensory, inter–and motor neurons) and neuronal circuits. The viewer will be able to use proxies to stimulate targeted circuits, which will light up, illustrating neuronal pathways along the worm’s body. The first iteration is planned to include a selected number of neurons and neuronal connections, showcasing key circuits which underly major sensations (chemosensation, mechanosensation, thermosensation) in young adult hermaphrodites.
We envision future iterations to include:
- a more complete set of neurons and circuits
- learning circuits
- the effect of aging
- the male nervous system
- behavioral output (evoked locomotion) of neuronal activation
- simultaneous stimulation of >1 circuits, etc.
In addition to applying neuroscience knowledge into building LuCelegans, we aspire to explore:
- interactions with art and design which relate to science–based installations of organismal models
- educational applications (middle–school, high–school, undergraduate students)
- artistic representations interplay with scientific fidelity in neurobiology–inspired installations
- audience interactions with a scientific specimen
- research priorities meeting artistic installations restrictions
The UARTS Faculty Engineering/Arts Student Team (FEAST) will be engaged in achieving the following goals:
- polish the first working prototype, the LuCelegans 1.0
- enrich the sensory modalities included in the model and enhance the ways a viewer can interact with it (LuCelegans 1.1 and 1.2)
- find a home for LuCelegans (e.g. museum, exhibit site in UoM)
- make LuCelegans available and accesible to the broader public
- set the stage for adding the effect of learning (work on LuCelegans 2.0)
We envision our prototype worm to ultimately grow into:
- an adventurous LuCelegans, that will travel to many places and visit many cities
- a friendly LuCelegans, that will invite researchers, students of all ages, and the broader public, to learn more about neuroscience and how the nervous system works
- an arty LuCelegans, that will be aesthetically beautiful and artistically intriguing
- a scientific LuCelegans, that will instigate discussions about the capabilities of nervous systems
- an evolving LuCelegans, that will continuously integrate new traits
- a playful LuCelegans, that will welcome people to play with it and learn from it
- a multifacetedLuCelegans, accompanied by special animations for the viewer to explore
- a responsive LuCelegans, that would actually move because of neuronal stimulation instigated by the viewer
Electronics/Sensors/Embedded Systems Specialist (1 Student)
Preferred Skills: Experience with Arduinos, GitHub, basic circuitry, soldering, and coding;
prerequisites: EECS 183 or equivalent.
Likely Majors/Minors: CE, CS, EE, ECE, IOE, ME
Controllers & Wireless Communication Specialist (1 Student)
Preferred Skills: Experience with Python, Raspberry Pi, Blender, and wireless communications systems.
Likely Majors/Minors: CE, CS, EE, ECE, IOE
3D Printing/CAD Specialist (1 Student)
Preferred Skills: Experience with CAD, 3D printing, and laser cutting. Basic carpentry skills will be an advantage. Tasks will include work with vinyl, wood, and acrylic, and integrating electrical circuits, sensors, LED strips, EL wires, etc., to the model.
Likely Majors/Minors: ARCH, ARTDES, BIO, CS, COGSCI, EE, ME, MSE, NEUROSCI, ROB
Sound Editing & Production (1 Student)
Preferred Skills: Experience with sound editing, sound engineering, and LogicPro is required. Successful candidate will work on the sonic component of the installation, and on an audio guide with scientific content.
Likely Majors/Minors: ARTDES, CE, CS, EE, PAT
Faculty Project Lead
 Eleni Gourgou received her BS in Biology from National & Kapodistrian University of Athens (NKUA), Greece, in 2003 and earned her PhD in Animal Cell Physiology also fromNKUA in 2010. She joined University of Michigan in 2011 as a postdoctoral fellow, working with microfluidic biochips and bio–MEMS. Later, she shifted her focus on the dynamics of biological systems and in 2015 she began working on memory and learning in invertebrate animals. She is currently a Research Faculty, in the rank of Associate Research Scientist, splitting her time between Mechanical Engineering Department and the Institute of Gerontology, Medical School. Her research interests lie at the interface of neurobiology, dynamics of biological systems, and behavioral neurogenetics on one side, and emerging technologies (e.g. 3D printing), mathematical biology, and imaging techniques on the other. To answer exciting neurobiology and aging–related questions, she uses the nematode C. elegans as a model system. She is the recipient of a NIH–NIA K01 Career Development Award.
Eleni Gourgou received her BS in Biology from National & Kapodistrian University of Athens (NKUA), Greece, in 2003 and earned her PhD in Animal Cell Physiology also fromNKUA in 2010. She joined University of Michigan in 2011 as a postdoctoral fellow, working with microfluidic biochips and bio–MEMS. Later, she shifted her focus on the dynamics of biological systems and in 2015 she began working on memory and learning in invertebrate animals. She is currently a Research Faculty, in the rank of Associate Research Scientist, splitting her time between Mechanical Engineering Department and the Institute of Gerontology, Medical School. Her research interests lie at the interface of neurobiology, dynamics of biological systems, and behavioral neurogenetics on one side, and emerging technologies (e.g. 3D printing), mathematical biology, and imaging techniques on the other. To answer exciting neurobiology and aging–related questions, she uses the nematode C. elegans as a model system. She is the recipient of a NIH–NIA K01 Career Development Award.
LuCelegans Project- Winter 2021 : Tackling the challenge
Phase 2 Team members: Sara Huang, Alexander (Alex) Raynolds, Jaehong Min, Mirella (Millie) Hernandez Lima, Richard Wall. Faculty Lead: Eleni Gourgou.
We are excited to share with you the progress we made over the Winter 2021 semester. We built on the foundations previously laid by Phase 1 Team during Fall2019-Fall2020.
The material is organized by topic/subteam. The format and structure selected by each subteam is maintentained, to reflect the diversity in approaches. Some entries follow a journal-type presentation of our week-to-week or month-to-month progress, others present an overview of the work done during the semester. The goal is to offer the public an inside view of how our team brainstormed, made decisions, shared knowledge, approached technical challenges, and reached some really important milestones.
We believe that reflecting on the way we work and function as a team is equally important with resolving technical issues. Especially for an interdisciplinary team like ours, the process is as rewarding as the outcome.
For more updates: http://elenigourgou.engin.umich.edu/the-lucelegans-project/
We thank ArtsEngine for the enthusiastic support. We are grateful to Deb Mexicotte, Greg Wakefield, and Amy Tackitt.
We are working on four different thrusts: i) the outer shell of the worm (vinyl cuticle, acrylic rings scaffold, support system), the design and structure of neurons with special features (e.g. PVD neuron with finger- or “menora”-like dendrites), and the light propagation along each neuronal circuit, ii) the electrical circuits that control the sensory activation and interactive nature of the modeled neurons, including the proxy for the sensory stimuli and the integration of the electrical parts with the rest of the physical components, iii) the video animations that will accompany the prototype, and iv) a sonic component in parallel with the visual representation of the activated neuronal circuits, as well as an audio guide.
Building Blocks and Materials Subteam
Millie, Alex, Sara, Richard
Timeline:
1st week after the formation of this subteam.
We will begin the fabrication of additional physical components for our C. elegans model. We will also be organizing the physical structure of the model as well as its dimensionality in a 3D CAD drawing. The main focus of the drawing currently is to model the head and tail sections of the worm and transition the diameter of our structural disks to create a natural looking physical model.
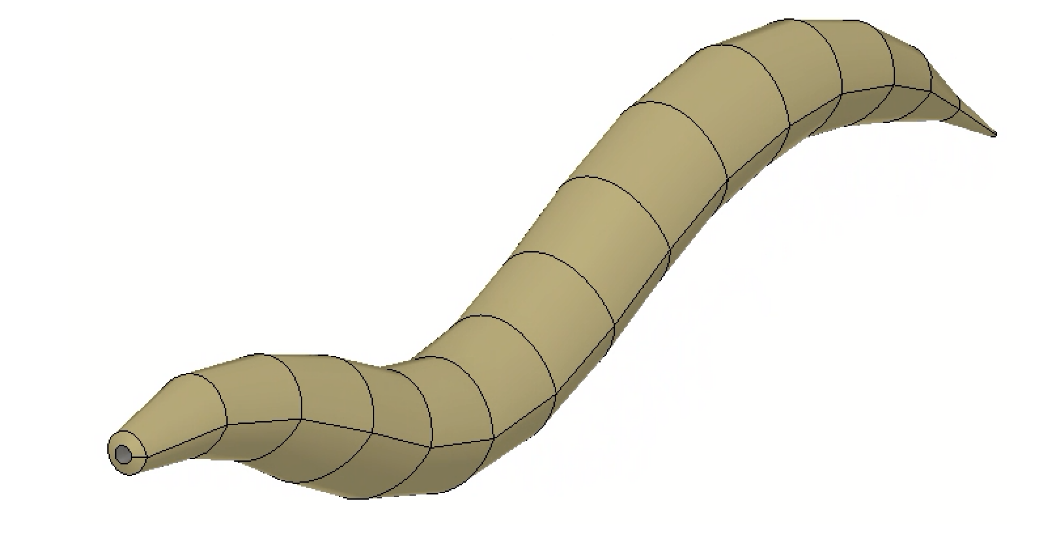
The structure of the worm that we have used as reference for the shapes of the skin to build our eventual 3D structure is pictured below. The individual sections are a vinyl sheet that wraps in a cylinder to form the shape of the worm.
2nd week
The team started to discuss the importance of design (e.g. research design process). We also agreed that the prototype will represent in sinoid structure (vs. straight). This meant that we would have to create support beams of different lengths to support the varying height of the worm’s body segments.
3rd week
The team organized the material inventory in the Design Lab. Eleni dropped off additional PDMS during this week.
Millie and Alex started working on the physical structure of the prototype. Millie cut the acrylic rings after Alex planned out the layouts and dimensions for both the acrylic rings and the vinyl skin. To create the structures that we had modelled in Rhino to our physical prototype, Alex worked with Fusion 360 and Adobe Illustrator to isolate the different components of the worm model based on the material they were to be made of and how they were to be fabricated.
For fabrication, the vinyl was determined to eventually be glued to the perimeter of the acrylic rings. The structure of the model was not to be sealed and we planned on making the bottom open for accessibility to the internal components.

Pictured below are the C. elegans cross-body sections that we used as reference for the acrylic rings that would be included in the worm model.
4th week
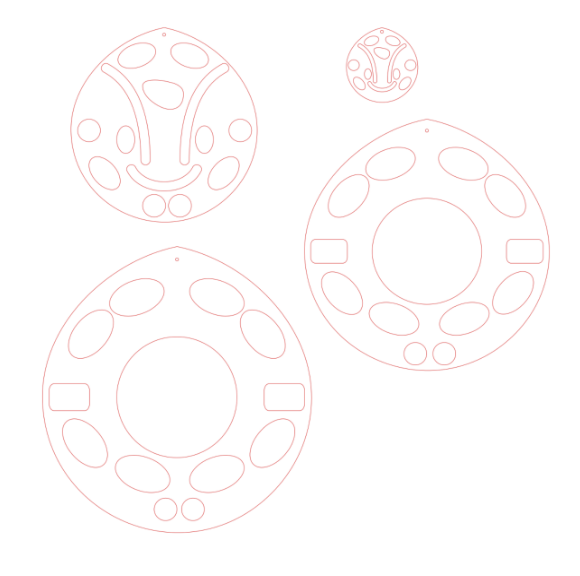
An example of the files that were used for cutting the rings out of acrylic is pictured to the right.
This week our team continued going forward in the fabrication of our acrylic rings and vinyl outer skin of our eventual model. We have previously determined the dimensions of the components and will be physically making them very soon. We used Adobe Illustrator to resize different ring orientations to match the biological structure of the worm’s internal body systems, specifically the internal hole structure of each ring and the circumference to match the size of the vinyl skin.
5th week
The overall goal for this week was to finish producing the physical components for the prototype. The building and materials team printed the rest of the structural rings that will be used for the body of the C. elegans. Millie and Alex met later in the week to discuss the design, number and location of the PVD neurons, which will be 3D printed for this stage of our model.
Progress Check
- Created Inventory list
- Organized materials at the design lab
- Identified new materials needed,
- Designed acrylic rings for all body sections.
- Converted design files to a printable adobe illustrator type.
6th week
The team discussed the feasibility of printing the support beams of the worm for the varying heights of the different acrylic rings in the 3D model. We could potentially machine a foundation with varying rod heights that could then utilize the foundation framework we already have.
How tall will we make the worm? Will it be a problem for the dimensions of the vinyl cut-outs if we reduce the maximum height of the worm in its display.
The team then further discussed this in a meeting at the design lab and began construction of the worm model using the acrylic rings that will not be raised above the table.
7th week
The team met twice, once to cut all of the vinyl skin that will go into the worm and a second time to finalize the base structure that will be supporting the worm as well as more construction of the worm’s 3D structure.
We determined that it would be best to use wood for the base structure and the support beams that will support the different sections of the worm.
The reference used for cutting the vinyl of the cuticle/skin
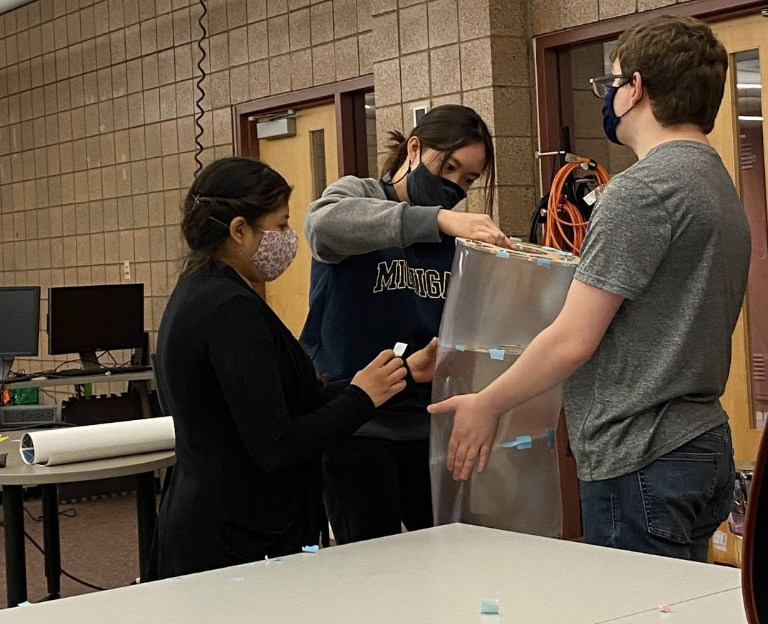
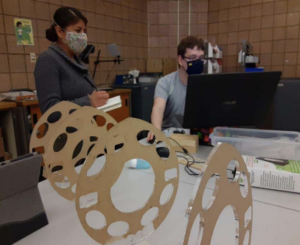
left to right: Millie, Sara, Richard – putting the sections together for a first iteration of the worm’s shell, at the Design Lab, Duderstadt Center.
8th week
Alex designed the base structure and determined the height of each support beam to match the shape of the worm model in our CAD drawing. The base itself was determined to be made of plywood and lumber with ¾ inch dowels for each support beam and have space to house the majority of the electrical components that will not go into the worm’s body. The team also chose the inclusion of two symmetrical support beams for each acrylic ring to widen the area where the center of mass would be supported.
9th week
With the support structure now planned out, Alex inquired with the rest of the team about how the acrylic rings will fit into the support beams. He was tasked with planning out the cuts and angles that would be necessary to hold each ring at the desired orientation.
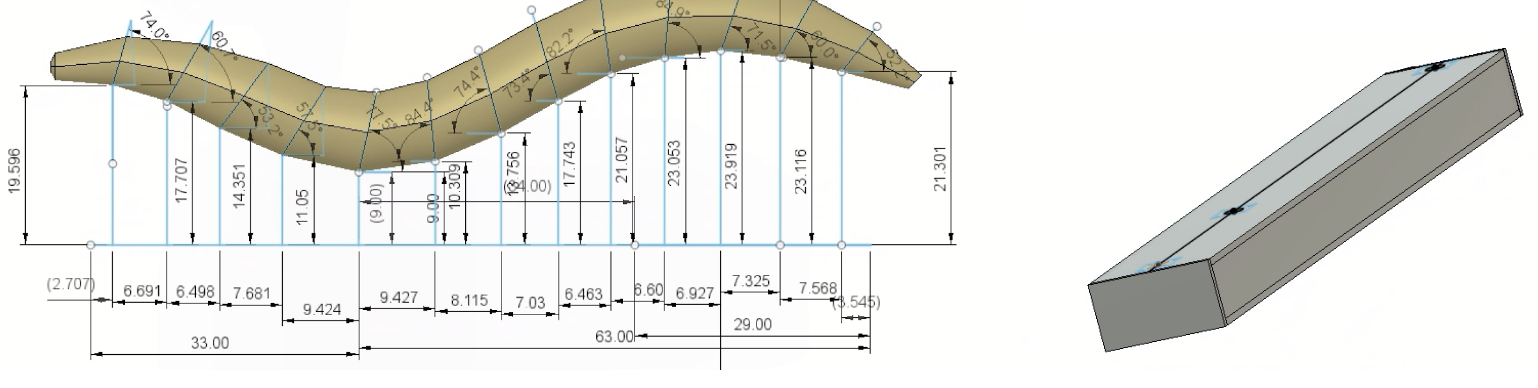
The spacing and height of these beams is depicted in the image on the left, while the base structure that will be made of the other wood components is pictured on the right.
Sensors and Circuits
Richard, Millie, Jaehong, Alex

Simulation of PVD, a mechanosensory neuron that responds to touch. Simulation of signal transduction using LED strips.
The nervous system receives and integrates information from both the external and internal environment through different sensory modalities. The integration of this information allows the organism to orchestrate behavioral responses. The marvelous Caenorhabditis elegans, like humans, has an extraordinary nervous system. Therefore, the goal of our team is to build the C.elegans’s neuronal circuitry of thermal-, chemo- and mechanosensory neurons.

Zoom meeting led by Richard designed to teach members how to use Arduino IDE
Our team is currently working with Arduino Uno and Raspberry Pi to execute our code. We are working with LEDs and EL wires to build the neural circuitry of the C.elegans. These light sources are being used to mimic signal transduction.
Richard and Millie discussing the neuronal circuitry of the thermosensory neuron AFD and its corresponding Arduino code.
Due to our diverse educational backgrounds, participation in this project has given many of us the opportunity to learn new software as well as gain new skills. For this sub-team, team members have learned to use Arduino IDE to write the codes for thermo-, chemo- and mechanosensory neurons.
The team’s dedication has led to great productivity. All codes for the neurons have been written. The next step for our team is to integrate the hardware and code to the prototype.

ANIMATION SUBTEAM
Richard, Sara, Alex
April (most recent): Pathway Creation
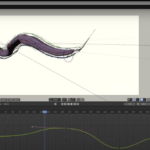
Using Blender, we edited and created preliminary camera pathways for incomplete neuronal circuit animations, including pathways for PVD and direct circuits.
Sara made a new path for viewing the PVD neurons.
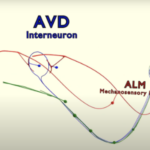
Richard created an animation video with color-coded labeling of the different types of neurons
March: Labeling/Subtitles
We discussed the implementation of labeling and subtitles within the animation
Richard giving the team a tutorial on Blender basics
February: Planning
We prioritized which neurons still need to be mapped and given the proper path for viewing as an informative animation.
We also continued to familiarize ourselves with Blender.
January: Learning how to use Blender
This was the Phase 2 team’s first introduction to the animation work done by Phase 1.
Sonic and Audio
Sara, Jaehong
1st week subteam started planning
This is the week that the subteam first worked on the sonic and audio portion of the project. Work began with brainstorming ideas for what the sonic component of the LuCelegans would be like. There was mainly discussion about whether the sounds of the sonic component should be synchronized with the animations, or the neural propagation represented by the LEDs.
2nd week
It was mainly discussed how the audio guide would be delivered. The two main choices were either having the audio guide accompany the animation video with some subtitles, or having it as an optional part of the model, much like how audio guides at museum exhibitions are something optional that viewers can choose to use or not. It was decided that the audio guide would be optional.
3rd week
The subteam decided that the sonic component would be divided into two parts – the sound for circuit activation and the sound for neuronal propagation. What the sound would be like would be discussed and brainstormed from here on out.
4th week
The subteam decided that there would be separate sound effects for the activation of the mechanosensory, thermosensory, and chemosensory neurons, and that the sounds for the neuronal propagation would be roughly the same sounds, but with different variations for each circuit.
5th week
The team exchanged concrete ideas for the neuronal propagation. Ideas were exchanged over sound files, and playing melodies on a keyboard.
6th week
After exchanging some thoughts and inspiration over some YouTube videos, the team decided that the sound for the neuronal propagation would be less melodic, and would be a more ambient and soundscape type of sound.
7th week
The team continued brainstorming sounds for the neuronal propagation, and started to search for actual sounds for activation.
8th week
The team found royalty-free downloadable sounds for the mechanosensory and thermosensory activation, and began to produce sounds for the neuronal propagation. These sounds will serve as working sounds for the propagation sound.
Likely Majors/Minors: ARCH, ARTDES, BIO, CE, CS, COGSCI, ECE, EE, IOE, ME, MSE, NEUROSCI, ROB
Meeting Details: Thursdays, 6:00-7:00pm, Design Lab 1, Duderstadt Media Center
Application: Consider including a link to your portfolio or other websites in the personal statement portion of your application to share work you would like considered as part of your submission.
Summer Opportunity: Summer research fellowships may be available for qualifying students.
Citizenship Requirements: This project is open to all students on campus.
IP/NDA: Students who successfully match to this project team will be required to sign an Intellectual Property (IP) Agreement prior to participation.
Course Substitutions: CoE Honors